


Tropiciel II to robot typu line follower. Powstał on do celów edukacyjnych i zastosowane w nim rozwiązania techniczne pochodzą zarówno z internetu, jak i z doświadczenia jakie zdobyłem budując poprzednią (nie do końca udaną) wersie tropiciela.


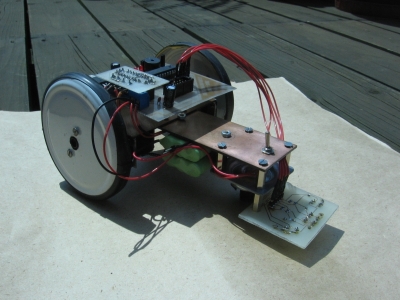
Jako kontroler zdecydowałem się na Atmege8, ze względu na wbudowany przetwornik analogowo-cyfrowy. Robot posiada cztery czujniki linii (TCRT5000). Ze względu na moją niechęć do stosowania przelotek w obwodzie drukowanym, zdecydowałem się na użycie dwóch osobnych płytek drukowanych. Na jednej znajduje się kontroler wraz z potrzebnym oprzyrządowaniem oraz bajery(diody, buzzer). Na drugiej zaś znajduje się mostek-H(L293D). Płytki te są nakładane jedna na drugą. Dzięki czemu niema, aż tak dużo przewodów w robocie. Na dodatkowej płytce, z przodu robota znajdują się czujniki, jak wcześniej wspominałem są to TCRT5000. Co do konstrukcji mechanicznej to nie będę się rozpisywał, ponieważ proces jej budowy opisałem dokładnie w dziale „Artykuły Praktyczne”. Akumulatory, to dwa pakiety służące do zasilania telefonów bezprzewodowych, połączone szeregowo dając napięcie 7,4V.






Dzięki układowi czujników jaki zastosowałem, robot jest w stanie bardzo szybko stwierdzić, że wyjechał poza linie. Może się wydawać, że cztery czujniki to jest mało, jednak dzięki dobremu rozmieszczeniu czujników ich mała ilość, nie przeszkadza podczas oprogramowania robota. Bardzo szybko, podczas testów robota okazało się, że bez sterowania silnikami przy pomocy metody PWM, się nie obędzie. Musiałem dosyć mocno obniżyć prędkość robota na zakrętach, dzięki czemu robot jeszcze dokładniej jedzie po linii.
Robot dostaje analogowe wartości z czujników, które są przeważane na dane cyfrowe przez przetwornik ADC. Nie bawiłem się w żadną auto kalibracje, choć istnieje taka możliwość. Dane z przetwornika ADC są porównywane z wartością potencjometru, także podłączonego do kontrolera. W ten sposób, otrzymałem bardzo podobny efekt jaki daje komparator analogowy, z tą różnicą, że uzyskałem to poprzez stosowny program, a nie dodatkowy układ scalony. Dzięki temu uprościłem elektronikę robota.

Na zakończenie napisze jeszcze, że jest to bardzo udana konstrukcja. W zasadzie to jedyny błąd, który później naprawiłem to był brak złącza do ładowania akumulatora. Ale to udało się naprawić, dodając dwa przewody do złączki zasilającej elektronikę.
