


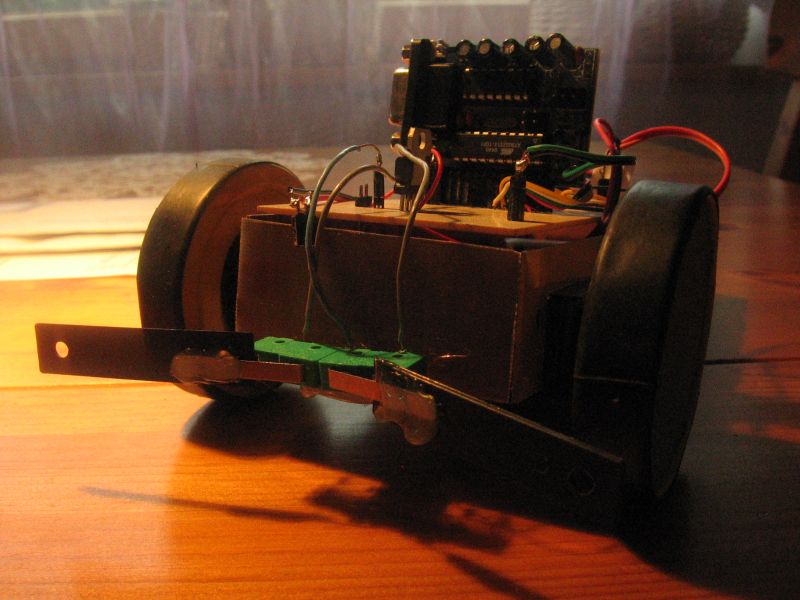
Robot „Szukasz 01” jest robotem omijającym przeszkody. Robi to przy pomocy dwóch czujników „wąsów” umieszczonych na przodzie.
Konstrukcja
Jego konstrukcja została wykonana z laminatu. zapewnia to sztywność i wytrzymałość konstrukcji. Z wycięciem laminatu można się trochę pomęczyć. Ja użyłem do tego celu szlifierki, co nie było dobrym pomysłem. Robiłem to na dworze, pozamykałem wszystkie okna, a i tak w domu śmierdziało laminatem. Do tego laminat się topił i na krawędziach pozostały czarne ślady. Ale jeśli chodzi o równość cięć to nie można nic jej zarzucić.


Elektronika

Kontrolerem sterującym robotem Jest układ AT90S2313. Dla uproszczenia konstrukcji zastosowałem układ z zestawu AVT-2683.

Sterownik do silników to układ scalony L298.
Napęd
Do napędu służą dwa serwa firmy TOWER PRO 5010. Napęd działa na zasadzie czołgu, jej działania chyba nie muszę tłumaczyć. Koła to zakrętki od słoików z nałożoną gumom z dętki. Zapewnia ona odpowiednią przyczepność, chociaż po dłuższym czasie pracy osiada na niej pył i już nie działa tak jak powinna.

Czujniki
Czujniki top dwa przełączniki krańcowe umieszczone na przodzie robota. Zostały one podłączone do przerwań zewnętrznych mikrokontrolera INT0 i INT1.

Program
Program napisałem w BASCOMIe. Jest prosty więc nawet go nie pokazuje. Jedyna umiejętność potrzebna do jego napisania to obsługa przerwań. A poza tym to zasadzie nic tam nie umieściłem.