


Chcę przedstawić mojego najnowszego robota, został on ochrzczony nazwą ?CD?, ze względu na swój główny materiał konstrukcyjny. Jest to robot budowany z myślą o zawodach micromouse, jednak w zawodach raczej nie wystartuje ze względu, że jest bardzo wolny. Jednak nie wykluczam startu, szczególnie, jeżeli były by organizowane zawody w Rybniku, o co bardzo proszę organizatorów. Ale nie będę się wywodził na tematy nie do końca związane z robotem, więc przejdę do opisu jego budowy.
")
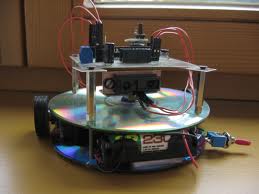
Konstrukcja nośna, to płyty CD sklejone przy pomocy kleju typu kropelka. Okazał się to bardzo wytrzymały materiał, choć bardzo ciężki w obróbce. Bardzo łatwo pęka, trzeba mieć ostre wiertła do wiercenia otworów w płytach, wiertło się ślizga, więc ciężki jest zacząć wiercenie, nawet jeżeli zaznaczyłem otwory małym punktakiem. Dodatkowym problemem podczas wiercenia w płytach była ich mała temperatura ?rozpuszczania się?. Trzeba było kilku prób żeby dobrać odpowiednie obroty wiertła, oraz siłę docisku. Generalnie jest to trudny materiał do obróbki, ale jego dostępność i sztywność przezwyciężyły i użyłem płyt. Jednak już mogę powiedzieć, że raczej nigdy więcej tego nie zrobię. Płyty te są poskręcane przy pomocy śrub M3, a pomiędzy nimi znajdują się serwa napędzające robota, akumulatory oraz płytka z układem mostka-h.
{kind=link}

Jako zasilanie wybrałem trzy typowe akumulatorki, Dają one napięcie około 5V, co pozwala zasilić elektronikę bez stabilizatora. Jednak przez to niskie napięcie robot jest bardzo wolny.
Jako napęd zastosowałem przerobione serwa Tower Pro. Miałem je pod ręką, a jeszcze się nie zdążyły wysłużyć. Do serw przymocowałem koła zakupione w firmie wobit. Te koła są bardzo fajne, ale łatwo łapią zabrudzenia i trzeba je często czyścić (np. spirytusem), ale po wyczyszczeniu mają przez pewien czas bardzo dobrą przyczepność.
Silnikami steruje mostek-h w postaci układu L293D. Jako kontroler użyłem układu Atmega8. Cała elektronika sterująca jest wykonana na płytce poprzedniego robota, za względu na duże ograniczenia czasowe.

Aktualnie w robocie działa jeden czujnik. Jest to dalmierz firmy sharp. Może on mierzyć odległości od 3cm do 30cm. Aby zlikwidować tą porządkową strefę martwą czujnika został on zlokalizowany w środku robota, także widzi przeszkody znajdujące się zaraz przed robotem. Dalmierz osadziłem na serwomechanizmie, co pozwala mu oglądać otoczenie w przed robotem jak i po jego prawej i lewej stronie.

Wyposażyłem także robota w dodatkowe czujniki, którymi są proste enkodery wykonane na optotranzystorach obiciowych CNY70. Ich zadaniem jest informować kontroler o tym, że na kole znajduje się biały pasek lub nie. Jednak jeszcze tych czujników nie podłączyłam, ze względu, że płytka sterownika nie pozwala mi chwilowo na to. Być może, że w przyszłości zostaną one także podłączone, już do nowej płytki sterownika.
")
A teraz film prezentujący aktualne możliwości robota.